
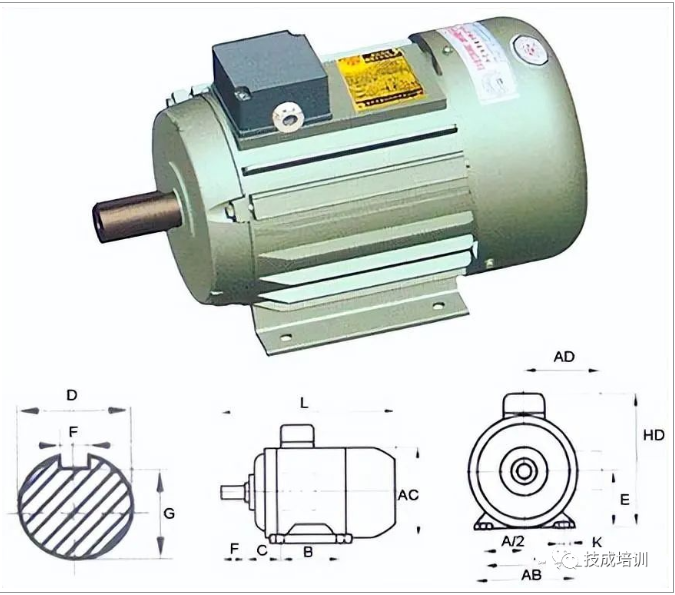
तीन-चरण असिंक्रोनसमोटरही एक प्रकारची इंडक्शन मोटर आहे जी एकाच वेळी ३८० व्होल्ट थ्री-फेज एसी करंट (१२० अंशांचा फेज फरक) जोडून चालते. थ्री-फेज असिंक्रोनस मोटरचे रोटर आणि स्टेटर फिरणारे चुंबकीय क्षेत्र एकाच दिशेने आणि वेगवेगळ्या वेगाने फिरते या वस्तुस्थितीमुळे, स्लिप रेट असतो, म्हणून त्याला थ्री-फेज असिंक्रोनस मोटर म्हणतात.
तीन-फेज असिंक्रोनस मोटरच्या रोटरचा वेग फिरणाऱ्या चुंबकीय क्षेत्राच्या वेगापेक्षा कमी असतो. रोटर वाइंडिंग चुंबकीय क्षेत्राशी सापेक्ष गतीमुळे इलेक्ट्रोमोटिव्ह फोर्स आणि करंट निर्माण करते आणि चुंबकीय क्षेत्राशी संवाद साधून इलेक्ट्रोमॅग्नेटिक टॉर्क निर्माण करते, ज्यामुळे ऊर्जा परिवर्तन होते.
सिंगल-फेज असिंक्रोनसशी तुलना केलीमोटर्स, तीन-चरण असिंक्रोनसमोटर्सचांगले ऑपरेटिंग परफॉर्मन्स आहे आणि विविध साहित्य वाचवू शकते.
वेगवेगळ्या रोटर स्ट्रक्चर्सनुसार, थ्री-फेज असिंक्रोनस मोटर्स पिंजरा प्रकार आणि जखमेच्या प्रकारात विभागल्या जाऊ शकतात.
केज रोटर असलेल्या असिंक्रोनस मोटरची रचना सोपी, विश्वासार्ह ऑपरेशन, हलके वजन आणि कमी किंमत आहे, जी मोठ्या प्रमाणावर वापरली जात आहे. त्याचा मुख्य तोटा म्हणजे वेग नियमनात अडचण.
जखमेच्या तीन-फेज असिंक्रोनस मोटरचे रोटर आणि स्टेटर देखील तीन-फेज विंडिंगसह सुसज्ज असतात आणि स्लिप रिंग्ज, ब्रशेसद्वारे बाह्य रिओस्टॅटशी जोडलेले असतात. रिओस्टॅटचा प्रतिकार समायोजित केल्याने मोटरची सुरुवातीची कार्यक्षमता सुधारू शकते आणि मोटरचा वेग समायोजित केला जाऊ शकतो.
तीन-चरण असिंक्रोनस मोटरचे कार्य तत्व
जेव्हा थ्री-फेज स्टेटर विंडिंगवर सममितीय तीन-फेज पर्यायी प्रवाह लागू केला जातो, तेव्हा एक फिरणारे चुंबकीय क्षेत्र तयार होते जे स्टेटर आणि रोटरच्या आतील वर्तुळाकार जागेवर घड्याळाच्या दिशेने समकालिक गतीने n1 ने फिरते.
फिरणारे चुंबकीय क्षेत्र n1 वेगाने फिरत असल्याने, रोटर कंडक्टर सुरुवातीला स्थिर असतो, म्हणून रोटर कंडक्टर प्रेरित इलेक्ट्रोमोटिव्ह बल निर्माण करण्यासाठी स्टेटर फिरणारे चुंबकीय क्षेत्र कापेल (प्रेरित इलेक्ट्रोमोटिव्ह बलाची दिशा उजव्या हाताच्या नियमाने निश्चित केली जाते).
रोटर कंडक्टरच्या दोन्ही टोकांवर शॉर्ट-सर्किट रिंगमुळे शॉर्ट सर्किटिंग होत असल्याने, प्रेरित इलेक्ट्रोमोटिव्ह फोर्सच्या क्रियेखाली, रोटर कंडक्टर एक प्रेरित करंट निर्माण करेल जो मुळात प्रेरित इलेक्ट्रोमोटिव्ह फोर्सच्या दिशेने असतो. रोटरचा विद्युत प्रवाह वाहणारा कंडक्टर स्टेटर चुंबकीय क्षेत्रात इलेक्ट्रोमॅग्नेटिक फोर्सच्या अधीन असतो (बलाची दिशा डाव्या हाताच्या नियमाचा वापर करून निश्चित केली जाते). इलेक्ट्रोमॅग्नेटिक फोर्स रोटर शाफ्टवर इलेक्ट्रोमॅग्नेटिक टॉर्क निर्माण करतो, ज्यामुळे रोटर फिरणाऱ्या चुंबकीय क्षेत्राच्या दिशेने फिरतो.
वरील विश्लेषणाद्वारे, असा निष्कर्ष काढता येतो की इलेक्ट्रिक मोटरचे कार्य तत्त्व खालीलप्रमाणे आहे: जेव्हा मोटरच्या तीन-फेज स्टेटर विंडिंग्ज (प्रत्येक १२० अंश विद्युत कोन फरकासह) तीन-फेज सममितीय पर्यायी प्रवाहाने भरले जातात, तेव्हा एक फिरणारे चुंबकीय क्षेत्र तयार होते, जे रोटर विंडिंग कापते आणि रोटर विंडिंगमध्ये प्रेरित प्रवाह निर्माण करते (रोटर विंडिंग एक बंद सर्किट आहे). विद्युत प्रवाह वाहून नेणारा रोटर कंडक्टर स्टेटर फिरणाऱ्या चुंबकीय क्षेत्राच्या क्रियेखाली इलेक्ट्रोमॅग्नेटिक बल निर्माण करेल, अशा प्रकारे, मोटर शाफ्टवर इलेक्ट्रोमॅग्नेटिक टॉर्क तयार होतो, ज्यामुळे मोटर फिरणाऱ्या चुंबकीय क्षेत्राच्या दिशेने फिरते.
तीन-फेज असिंक्रोनस मोटरचे वायरिंग आकृती
तीन-चरण असिंक्रोनस मोटर्सचे मूलभूत वायरिंग:
तीन-फेज असिंक्रोनस मोटरच्या वाइंडिंगमधून निघणाऱ्या सहा तारांना दोन मूलभूत कनेक्शन पद्धतींमध्ये विभागता येते: डेल्टा डेल्टा कनेक्शन आणि स्टार कनेक्शन.
सहा वायर्स = तीन मोटर विंडिंग्ज = तीन हेड एंड्स + तीन टेल एंड्स, मल्टीमीटरने एकाच विंडिंगच्या हेड आणि टेल एंड्समधील कनेक्शन मोजले जाते, म्हणजेच U1-U2, V1-V2, W1-W2.
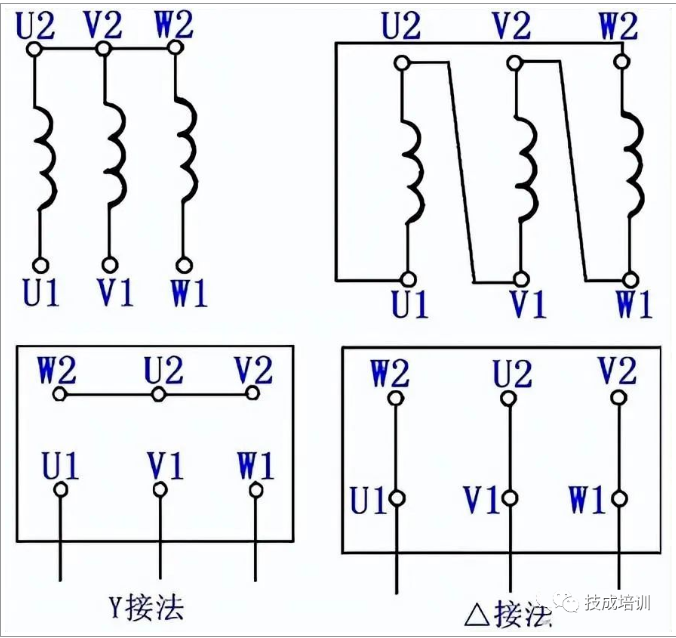
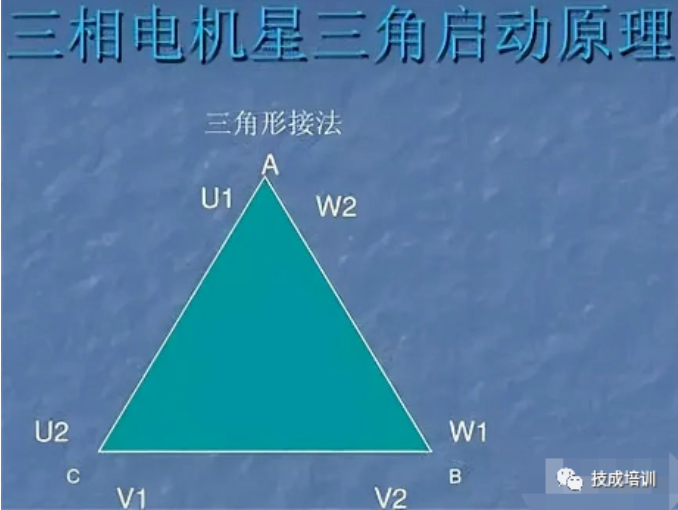
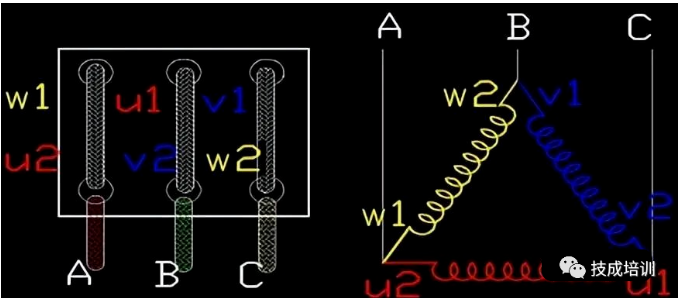
१. तीन-फेज असिंक्रोनस मोटर्ससाठी त्रिकोणी डेल्टा कनेक्शन पद्धत
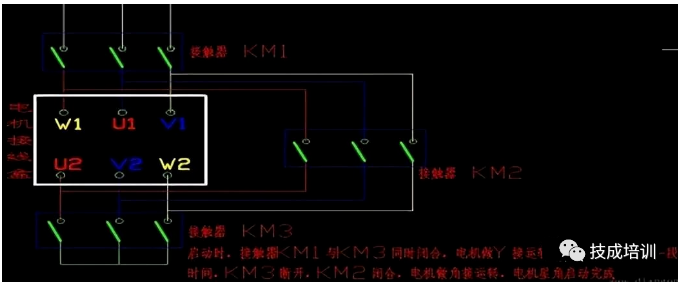
त्रिकोण डेल्टा कनेक्शन पद्धत म्हणजे आकृतीत दाखवल्याप्रमाणे, तीन विंडिंग्जचे डोके आणि शेपटी क्रमाने जोडून त्रिकोण तयार करणे:
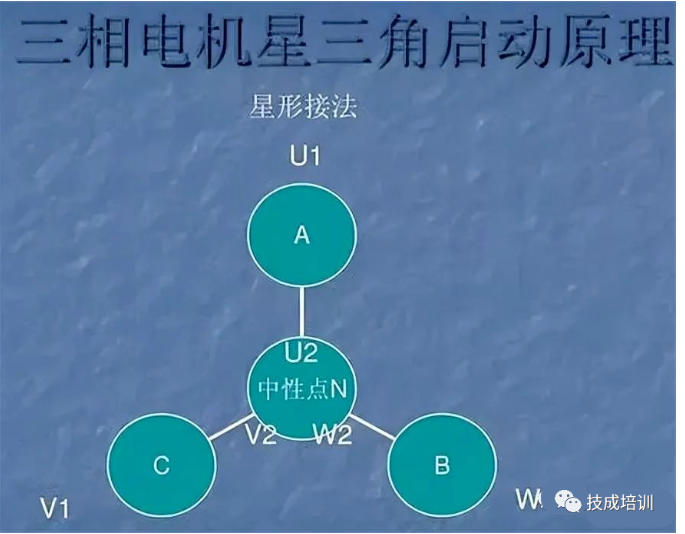
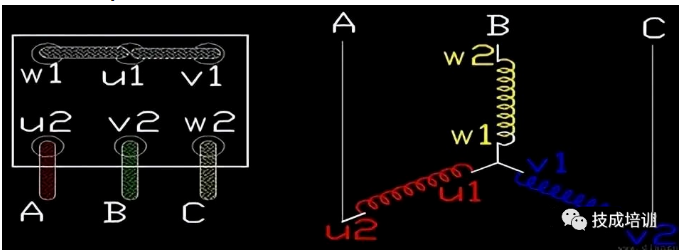
२. तीन-फेज असिंक्रोनस मोटर्ससाठी स्टार कनेक्शन पद्धत
स्टार कनेक्शन पद्धत म्हणजे तीन विंडिंग्जच्या शेपटीच्या किंवा डोक्याच्या टोकांना जोडणे आणि इतर तीन तारा वीज जोडणी म्हणून वापरल्या जातात. आकृतीमध्ये दाखवल्याप्रमाणे कनेक्शन पद्धत:
आकृत्या आणि मजकुरात थ्री फेज असिंक्रोनस मोटरच्या वायरिंग आकृतीचे स्पष्टीकरण
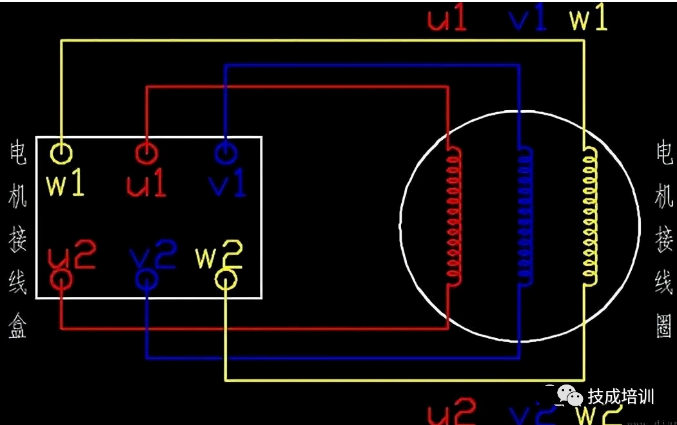
थ्री फेज मोटर जंक्शन बॉक्स
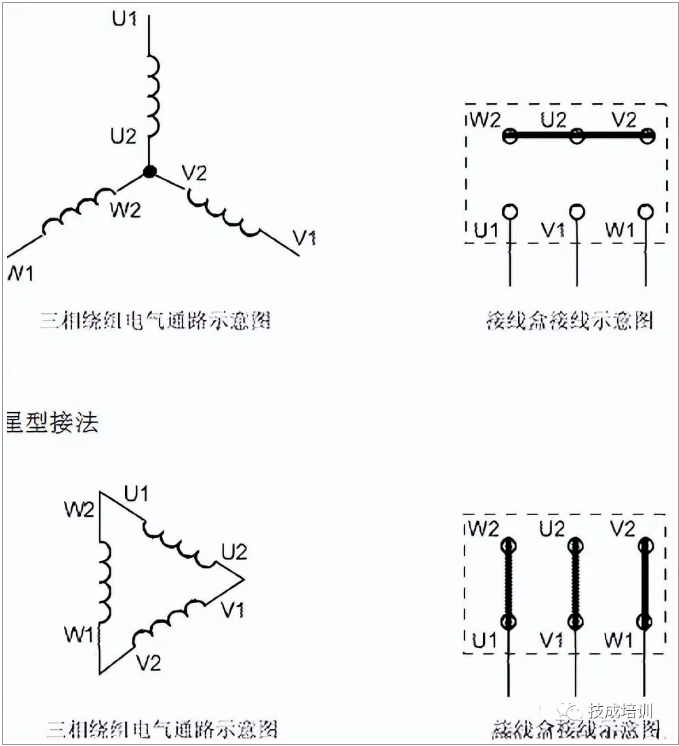
जेव्हा तीन-फेज असिंक्रोनस मोटर जोडली जाते, तेव्हा जंक्शन बॉक्समधील कनेक्टिंग पीसची जोडणी पद्धत खालीलप्रमाणे असते:
जेव्हा तीन-फेज असिंक्रोनस मोटर कोपऱ्यात जोडलेली असते, तेव्हा जंक्शन बॉक्स कनेक्शन पीसची कनेक्शन पद्धत खालीलप्रमाणे असते:
तीन-फेज असिंक्रोनस मोटर्ससाठी दोन कनेक्शन पद्धती आहेत: स्टार कनेक्शन आणि त्रिकोणी कनेक्शन.
त्रिकोणीकरण पद्धत
समान व्होल्टेज आणि वायर व्यास असलेल्या वाइंडिंग कॉइलमध्ये, स्टार कनेक्शन पद्धतीमध्ये प्रति फेज तीन पट कमी वळणे (१.७३२ पट) आणि त्रिकोणी कनेक्शन पद्धतीपेक्षा तीन पट कमी पॉवर असते. तयार मोटरची कनेक्शन पद्धत ३८० व्होल्टेजचा व्होल्टेज सहन करण्यासाठी निश्चित केली गेली आहे आणि सामान्यतः ती बदलासाठी योग्य नाही.
जेव्हा तीन-चरण व्होल्टेज पातळी सामान्य 380V पेक्षा वेगळी असते तेव्हाच कनेक्शन पद्धत बदलता येते. उदाहरणार्थ, जेव्हा तीन-चरण व्होल्टेज पातळी 220V असते, तेव्हा मूळ तीन-चरण व्होल्टेज 380V ची स्टार कनेक्शन पद्धत त्रिकोणी कनेक्शन पद्धतीमध्ये बदलणे लागू होऊ शकते; जेव्हा तीन-चरण व्होल्टेज पातळी 660V असते, तेव्हा मूळ तीन-चरण व्होल्टेज 380V डेल्टा कनेक्शन पद्धत स्टार कनेक्शन पद्धतीमध्ये बदलता येते आणि त्याची शक्ती अपरिवर्तित राहते. सामान्यतः, कमी-शक्तीच्या मोटर्स स्टार कनेक्टेड असतात, तर उच्च-शक्तीच्या मोटर्स डेल्टा कनेक्टेड असतात.
रेटेड व्होल्टेजवर, डेल्टा कनेक्टेड मोटर वापरली पाहिजे. जर ती स्टार कनेक्टेड मोटरमध्ये बदलली तर ती कमी व्होल्टेज ऑपरेशनशी संबंधित आहे, ज्यामुळे मोटर पॉवर आणि स्टार्टिंग करंट कमी होतो. हाय-पॉवर मोटर (डेल्टा कनेक्शन पद्धत) सुरू करताना, करंट खूप जास्त असतो. लाईनवरील स्टार्टिंग करंटचा प्रभाव कमी करण्यासाठी, सामान्यतः स्टेप-डाउन स्टार्टिंगचा अवलंब केला जातो. एक पद्धत म्हणजे मूळ डेल्टा कनेक्शन पद्धत स्टार्टिंगसाठी स्टार कनेक्शन पद्धतीमध्ये बदलणे. स्टार कनेक्शन पद्धत सुरू केल्यानंतर, ती ऑपरेशनसाठी पुन्हा डेल्टा कनेक्शन पद्धतीमध्ये रूपांतरित केली जाते.
तीन-फेज असिंक्रोनस मोटरचे वायरिंग आकृती
तीन-फेज असिंक्रोनस मोटर्ससाठी फॉरवर्ड आणि रिव्हर्स ट्रान्सफर लाईन्सचे भौतिक आकृती:
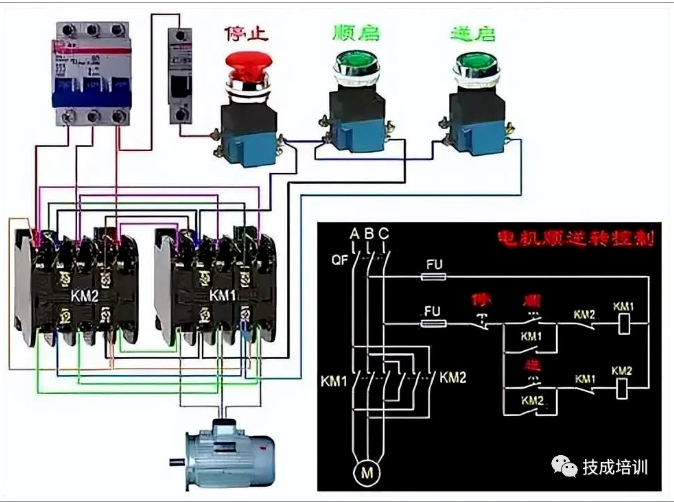
मोटरचे फॉरवर्ड आणि रिव्हर्स कंट्रोल साध्य करण्यासाठी, त्याच्या पॉवर सप्लायचे कोणतेही दोन फेज एकमेकांच्या सापेक्ष समायोजित केले जाऊ शकतात (आपण त्याला कम्युटेशन म्हणतो). सहसा, V फेज अपरिवर्तित राहतो आणि U फेज आणि W फेज एकमेकांच्या सापेक्ष समायोजित केले जातात. दोन कॉन्टॅक्टर्स कार्यरत असताना मोटरचा फेज सीक्वेन्स विश्वसनीयरित्या एक्सचेंज करता येईल याची खात्री करण्यासाठी, वायरिंग कॉन्टॅक्टच्या वरच्या पोर्टवर सुसंगत असावी आणि कॉन्टॅक्टरच्या खालच्या पोर्टवर फेज समायोजित करावा. दोन फेजच्या फेज सीक्वेन्स स्वॅपिंगमुळे, दोन KM कॉइल एकाच वेळी चालू करता येणार नाहीत याची खात्री करणे आवश्यक आहे, अन्यथा गंभीर फेज टू फेज शॉर्ट सर्किट फॉल्ट होऊ शकतात. म्हणून, इंटरलॉकिंगचा अवलंब करणे आवश्यक आहे.
सुरक्षिततेच्या कारणास्तव, बटण इंटरलॉकिंग (मेकॅनिकल) आणि कॉन्टॅक्टर इंटरलॉकिंग (इलेक्ट्रिकल) असलेले डबल इंटरलॉकिंग फॉरवर्ड आणि रिव्हर्स कंट्रोल सर्किट बहुतेकदा वापरले जाते; बटण इंटरलॉकिंग वापरून, फॉरवर्ड आणि रिव्हर्स बटणे एकाच वेळी दाबली गेली तरीही, फेज समायोजनासाठी वापरलेले दोन कॉन्टॅक्टर एकाच वेळी चालू करता येत नाहीत, ज्यामुळे फेज टू फेज शॉर्ट सर्किट टाळता येतात.
याव्यतिरिक्त, लागू केलेल्या कॉन्टॅक्टर्सच्या इंटरलॉकिंगमुळे, जोपर्यंत एक कॉन्टॅक्टर चालू असतो तोपर्यंत त्याचा दीर्घकाळ बंद संपर्क बंद होणार नाही. अशाप्रकारे, यांत्रिक आणि इलेक्ट्रिकल ड्युअल इंटरलॉकिंगच्या वापरामध्ये, मोटरच्या पॉवर सप्लाय सिस्टममध्ये फेज टू फेज शॉर्ट सर्किट्स असू शकत नाहीत, ज्यामुळे मोटरचे प्रभावीपणे संरक्षण होते आणि फेज मॉड्युलेशन दरम्यान फेज टू फेज शॉर्ट सर्किट्समुळे होणारे अपघात टाळता येतात, ज्यामुळे कॉन्टॅक्टर बर्न होऊ शकतो.
पोस्ट वेळ: ऑगस्ट-०७-२०२३


