
शुद्ध इलेक्ट्रिक वाहनाची रचना आणि रचना पारंपारिक अंतर्गत ज्वलन इंजिनवर चालणाऱ्या वाहनापेक्षा वेगळी असते. हे एक जटिल प्रणाली अभियांत्रिकी देखील आहे. इष्टतम नियंत्रण प्रक्रिया साध्य करण्यासाठी पॉवर बॅटरी तंत्रज्ञान, मोटर ड्राइव्ह तंत्रज्ञान, ऑटोमोटिव्ह तंत्रज्ञान आणि आधुनिक नियंत्रण सिद्धांत एकत्रित करणे आवश्यक आहे. इलेक्ट्रिक वाहन विज्ञान आणि तंत्रज्ञानाच्या विकास आराखड्यात, देश "तीन अनुलंब आणि तीन क्षैतिज" च्या R&D मांडणीचे पालन करत आहे आणि तंत्रज्ञान परिवर्तन धोरणानुसार "तीन क्षैतिज" च्या सामान्य प्रमुख तंत्रज्ञानावरील संशोधनावर प्रकाश टाकतो. "शुद्ध इलेक्ट्रिक ड्राइव्ह", म्हणजेच, ड्राइव्ह मोटर आणि त्याची नियंत्रण प्रणाली, पॉवर बॅटरी आणि तिची व्यवस्थापन प्रणाली आणि पॉवरट्रेन नियंत्रण प्रणाली यावर संशोधन. प्रत्येक प्रमुख उत्पादक राष्ट्रीय विकास धोरणानुसार स्वतःचे व्यवसाय विकास धोरण तयार करतो.
लेखक नवीन उर्जा पॉवरट्रेनच्या विकास प्रक्रियेतील प्रमुख तंत्रज्ञानाचे वर्गीकरण करतो, पॉवरट्रेनच्या डिझाइन, चाचणी आणि उत्पादनासाठी सैद्धांतिक आधार आणि संदर्भ प्रदान करतो. शुद्ध इलेक्ट्रिक वाहनांच्या पॉवरट्रेनमधील इलेक्ट्रिक ड्राइव्हच्या प्रमुख तंत्रज्ञानाचे विश्लेषण करण्यासाठी योजना तीन प्रकरणांमध्ये विभागली गेली आहे. आज, आम्ही प्रथम इलेक्ट्रिक ड्राइव्ह तंत्रज्ञानाचे तत्त्व आणि वर्गीकरण सादर करू.
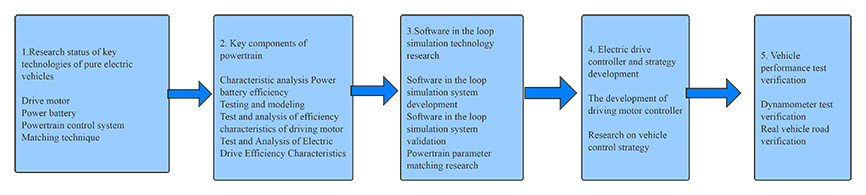
आकृती 1 पॉवरट्रेन विकासातील प्रमुख दुवे
सध्या, शुद्ध इलेक्ट्रिक वाहन पॉवरट्रेनच्या मुख्य प्रमुख तंत्रज्ञानामध्ये खालील चार श्रेणींचा समावेश आहे:
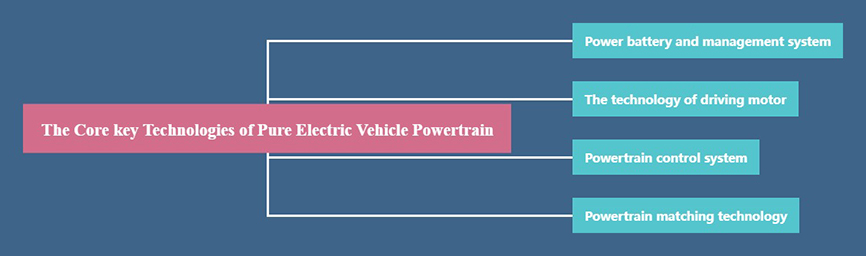
आकृती 2 पॉवरट्रेनचे मुख्य प्रमुख तंत्रज्ञान
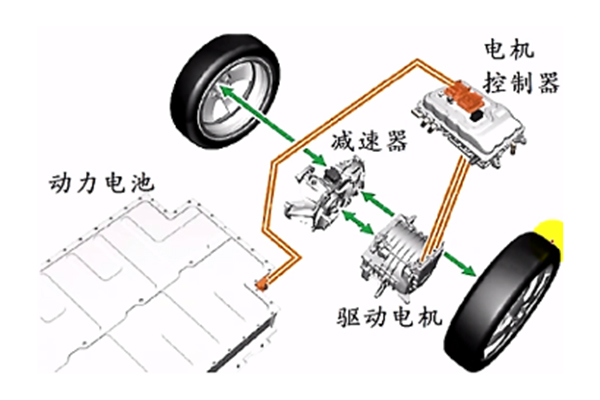
ड्रायव्हिंग मोटर सिस्टमची व्याख्या
वाहन उर्जा बॅटरीची स्थिती आणि वाहनाच्या उर्जेच्या आवश्यकतेनुसार, ते ऑन-बोर्ड ऊर्जा साठवण उर्जा निर्मिती उपकरणाद्वारे विद्युत उर्जेचे आउटपुट यांत्रिक उर्जेमध्ये रूपांतरित करते आणि ट्रान्समिटिंग यंत्राद्वारे आणि पार्ट्सद्वारे उर्जा ड्रायव्हिंग व्हीलमध्ये प्रसारित केली जाते. वाहनाच्या यांत्रिक ऊर्जेचे विद्युत उर्जेमध्ये रूपांतर होते आणि वाहन ब्रेक केल्यावर ऊर्जा साठवण यंत्रात परत दिले जाते. इलेक्ट्रिक ड्रायव्हिंग सिस्टीममध्ये मोटर, ट्रान्समिशन मेकॅनिझम, मोटर कंट्रोलर आणि इतर घटक समाविष्ट आहेत. इलेक्ट्रिक एनर्जी ड्रायव्हिंग सिस्टीमच्या तांत्रिक पॅरामीटर्सच्या डिझाइनमध्ये प्रामुख्याने पॉवर, टॉर्क, स्पीड, व्होल्टेज, ट्रान्समिशन रेशो, पॉवर सप्लाय कॅपेसिटन्स, आउटपुट पॉवर, व्होल्टेज, करंट इ.

1) मोटर कंट्रोलर
याला इन्व्हर्टर देखील म्हणतात, ते पॉवर बॅटरी पॅकद्वारे डायरेक्ट करंट इनपुटला पर्यायी करंटमध्ये बदलते. मुख्य घटक:
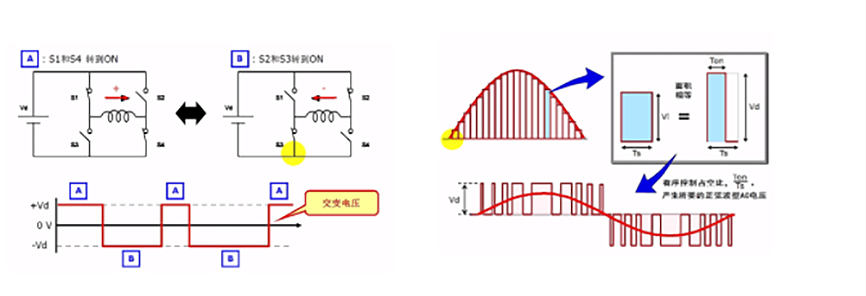
◎ IGBT: पॉवर इलेक्ट्रॉनिक स्विच, तत्त्व: कंट्रोलरद्वारे, IGBT ब्रिज आर्म नियंत्रित करण्यासाठी विशिष्ट वारंवारता बंद करा आणि तीन-टप्प्यामध्ये पर्यायी प्रवाह निर्माण करण्यासाठी अनुक्रम स्विच करा. पॉवर इलेक्ट्रॉनिक स्विच बंद करण्यासाठी नियंत्रित करून, पर्यायी व्होल्टेज रूपांतरित केले जाऊ शकते. मग ड्यूटी सायकल नियंत्रित करून एसी व्होल्टेज तयार केले जाते.
◎ फिल्म कॅपेसिटन्स: फिल्टरिंग फंक्शन; करंट सेन्सर: थ्री-फेज विंडिंगचा करंट शोधत आहे.
2) नियंत्रण आणि ड्रायव्हिंग सर्किट: संगणक नियंत्रण बोर्ड, ड्रायव्हिंग IGBT
मोटर कंट्रोलरची भूमिका DC ला AC मध्ये रूपांतरित करणे, प्रत्येक सिग्नल प्राप्त करणे आणि संबंधित शक्ती आणि टॉर्क आउटपुट करणे आहे. मुख्य घटक: पॉवर इलेक्ट्रॉनिक स्विच, फिल्म कॅपेसिटर, करंट सेन्सर, वेगवेगळे स्विचेस उघडण्यासाठी कंट्रोल ड्राइव्ह सर्किट, वेगवेगळ्या दिशानिर्देशांमध्ये प्रवाह तयार करणे आणि पर्यायी व्होल्टेज तयार करणे. म्हणून, आपण साइनसॉइडल अल्टरनेटिंग करंट आयतामध्ये विभागू शकतो. आयतांचे क्षेत्रफळ समान उंचीसह व्होल्टेजमध्ये रूपांतरित केले जाते. x-अक्ष कर्तव्य चक्र नियंत्रित करून लांबीचे नियंत्रण ओळखतो आणि शेवटी क्षेत्राचे समतुल्य रूपांतरण लक्षात घेतो. अशाप्रकारे, तीन-फेज एसी पॉवर व्युत्पन्न करण्यासाठी कंट्रोलरद्वारे एका विशिष्ट वारंवारतेवर आणि क्रमाने स्विच करून IGBT ब्रिज आर्म बंद करण्यासाठी डीसी पॉवर नियंत्रित केली जाऊ शकते.
सध्या, ड्राईव्ह सर्किटचे मुख्य घटक आयातीवर अवलंबून आहेत: कॅपेसिटर, IGBT/MOSFET स्विच ट्यूब, DSP, इलेक्ट्रॉनिक चिप्स आणि इंटिग्रेटेड सर्किट्स, जे स्वतंत्रपणे तयार केले जाऊ शकतात परंतु त्यांची क्षमता कमकुवत आहे: विशेष सर्किट, सेन्सर्स, कनेक्टर, जे असू शकतात. स्वतंत्रपणे उत्पादित: वीज पुरवठा, डायोड, इंडक्टर, मल्टीलेयर सर्किट बोर्ड, इन्सुलेटेड वायर, रेडिएटर्स.
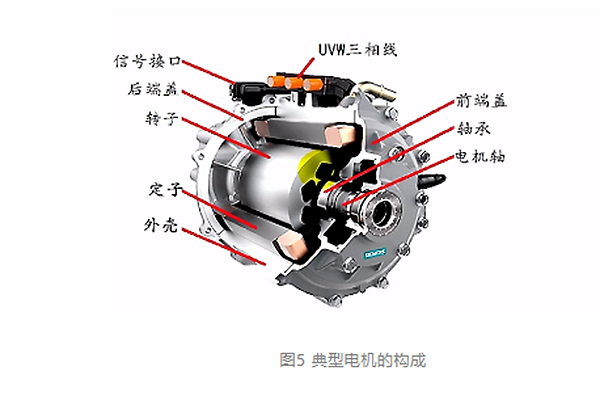
३) मोटर: थ्री-फेज अल्टरनेटिंग करंट मशिनरीमध्ये रूपांतरित करा
◎ रचना: पुढील आणि मागील बाजूचे कव्हर, शेल, शाफ्ट आणि बेअरिंग
◎ चुंबकीय सर्किट: स्टेटर कोर, रोटर कोर
◎ सर्किट: स्टेटर विंडिंग, रोटर कंडक्टर
4) ट्रान्समिटिंग डिव्हाइस
गिअरबॉक्स किंवा रीड्यूसर मोटरद्वारे टॉर्क स्पीड आउटपुटला संपूर्ण वाहनाला आवश्यक असलेल्या गती आणि टॉर्कमध्ये बदलतो.
ड्रायव्हिंग मोटरचा प्रकार
ड्रायव्हिंग मोटर्स खालील चार श्रेणींमध्ये विभागल्या आहेत. सध्या, एसी इंडक्शन मोटर्स आणि कायम चुंबक सिंक्रोनस मोटर्स हे नवीन ऊर्जा इलेक्ट्रिक वाहनांचे सर्वात सामान्य प्रकार आहेत. म्हणून आम्ही एसी इंडक्शन मोटर आणि परमनंट मॅग्नेट सिंक्रोनस मोटरच्या तंत्रज्ञानावर लक्ष केंद्रित करतो.
| डीसी मोटर | एसी इंडक्शन मोटर | कायम चुंबक सिंक्रोनस मोटर | अनिच्छा मोटर स्विच केली | |
| फायदा | कमी खर्च, नियंत्रण प्रणालीची कमी आवश्यकता | कमी खर्च, विस्तृत पॉवर कव्हरेज, विकसित नियंत्रण तंत्रज्ञान, उच्च विश्वसनीयता | उच्च पॉवर घनता, उच्च कार्यक्षमता, लहान आकार | साधी रचना, नियंत्रण प्रणालीची कमी आवश्यकता |
| गैरसोय | उच्च देखभाल आवश्यकता, कमी गती, कमी टॉर्क, लहान आयुष्य | लहान कार्यक्षम क्षेत्र कमी उर्जा घनता | उच्च किंमत खराब पर्यावरण अनुकूलता | मोठे टॉर्क चढउतार उच्च कार्यरत आवाज |
| अर्ज | लहान किंवा लहान कमी गतीचे इलेक्ट्रिक वाहन | इलेक्ट्रिक व्यवसाय वाहन आणि प्रवासी कार | इलेक्ट्रिक व्यवसाय वाहन आणि प्रवासी कार | मिश्रण-शक्ती वाहन |
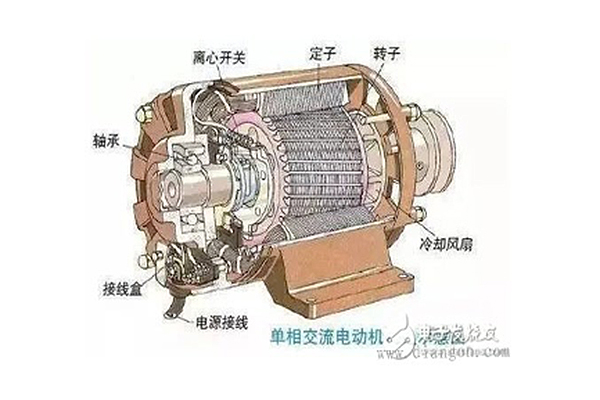 1)AC इंडक्शन असिंक्रोनस मोटर
1)AC इंडक्शन असिंक्रोनस मोटर
एसी इंडक्टिव्ह एसिंक्रोनस मोटरचे कार्य तत्त्व हे आहे की विंडिंग स्टेटर स्लॉट आणि रोटरमधून जाईल: ते उच्च चुंबकीय चालकता असलेल्या पातळ स्टीलच्या शीट्सने स्टॅक केलेले आहे. थ्री-फेज वीज विंडिंगमधून जाईल. फॅराडेच्या इलेक्ट्रोमॅग्नेटिक इंडक्शन कायद्यानुसार, फिरणारे चुंबकीय क्षेत्र तयार केले जाईल, ज्यामुळे रोटर फिरते. स्टेटरचे तीन कॉइल 120 अंशांच्या अंतराने जोडलेले असतात आणि विद्युत प्रवाह वाहून नेणारा कंडक्टर त्यांच्याभोवती चुंबकीय क्षेत्र निर्माण करतो. जेव्हा या विशेष व्यवस्थेसाठी तीन-टप्प्याचा वीज पुरवठा लागू केला जातो, तेव्हा चुंबकीय क्षेत्रे एका विशिष्ट वेळी आलटून पालटून वेगवेगळ्या दिशांना बदलतील, एकसमान रोटिंग तीव्रतेसह चुंबकीय क्षेत्र निर्माण करेल. चुंबकीय क्षेत्राच्या फिरत्या गतीला समकालिक गती म्हणतात. समजा, फॅराडेच्या नियमानुसार, एक बंद कंडक्टर आत ठेवला आहे, कारण चुंबकीय क्षेत्र परिवर्तनीय आहे, लूपला इलेक्ट्रोमोटिव्ह बल जाणवेल, ज्यामुळे लूपमध्ये विद्युत् प्रवाह निर्माण होईल. ही परिस्थिती चुंबकीय क्षेत्रामध्ये वर्तमान वाहून नेणारी लूप, लूपवर इलेक्ट्रोमॅग्नेटिक बल निर्माण करते आणि हुआन जिआंग फिरू लागते. गिलहरी पिंजऱ्यासारखे काहीतरी वापरून, तीन-टप्प्याचा पर्यायी प्रवाह स्टेटरमधून फिरणारे चुंबकीय क्षेत्र तयार करेल आणि विद्युत प्रवाह शेवटच्या रिंगने लहान असलेल्या गिलहरी पिंजऱ्याच्या बारमध्ये प्रेरित होईल, त्यामुळे रोटर फिरू लागतो, म्हणजे मोटरला इंडक्शन मोटर का म्हणतात. विद्युत चुंबकीय इंडक्शनच्या साहाय्याने रोटरला थेट जोडण्याऐवजी रोटरमध्ये इन्सुलेटिंग आयर्न कोर फ्लेक्स भरले जातात, ज्यामुळे लहान आकाराचे लोखंड कमीतकमी एडी विद्युत प्रवाहाचे नुकसान सुनिश्चित करते.
2) एसी सिंक्रोनस मोटर
सिंक्रोनस मोटरचा रोटर एसिंक्रोनस मोटरपेक्षा वेगळा असतो. रोटरवर कायमस्वरूपी चुंबक स्थापित केले आहे, जे पृष्ठभाग आरोहित प्रकार आणि एम्बेडेड प्रकारात विभागले जाऊ शकते. रोटर सिलिकॉन स्टील शीटचे बनलेले आहे, आणि कायम चुंबक एम्बेड केलेले आहे. स्टेटरला 120 च्या फेज फरकासह पर्यायी प्रवाहाने देखील जोडलेले आहे, जे साइन वेव्ह अल्टरनेटिंग करंटचा आकार आणि टप्पा नियंत्रित करते, जेणेकरून स्टेटरद्वारे निर्माण होणारे चुंबकीय क्षेत्र रोटरद्वारे निर्माण केलेल्या चुंबकीय क्षेत्राच्या विरुद्ध असेल आणि चुंबकीय फील्ड फिरत आहे. अशा प्रकारे, स्टेटर चुंबकाने आकर्षित होतो आणि रोटरसह फिरतो. स्टेटर आणि रोटर शोषणाद्वारे चक्रानंतर सायकल तयार केली जाते.
निष्कर्ष: इलेक्ट्रिक वाहनांसाठी मोटर ड्राइव्ह मुळात मुख्य प्रवाहात बनली आहे, परंतु ती एकल नाही तर वैविध्यपूर्ण आहे. प्रत्येक मोटर ड्राइव्ह सिस्टमचे स्वतःचे सर्वसमावेशक निर्देशांक असते. विद्यमान इलेक्ट्रिक वाहन ड्राइव्हमध्ये प्रत्येक प्रणाली लागू केली जाते. त्यापैकी बहुतेक एसिंक्रोनस मोटर्स आणि कायम चुंबक सिंक्रोनस मोटर्स आहेत, तर काही अनिच्छा मोटर्स स्विच करण्याचा प्रयत्न करतात. हे लक्षात घेण्यासारखे आहे की मोटर ड्राइव्ह पॉवर इलेक्ट्रॉनिक्स तंत्रज्ञान, मायक्रोइलेक्ट्रॉनिक तंत्रज्ञान, डिजिटल तंत्रज्ञान, स्वयंचलित नियंत्रण तंत्रज्ञान, मटेरियल सायन्स आणि इतर विषयांना एकत्रित करते आणि विविध विषयांच्या व्यापक अनुप्रयोग आणि विकासाच्या शक्यता प्रतिबिंबित करते. हे इलेक्ट्रिक वाहन मोटर्समध्ये एक मजबूत प्रतिस्पर्धी आहे. भविष्यातील इलेक्ट्रिक वाहनांमध्ये स्थान मिळविण्यासाठी, सर्व प्रकारच्या मोटर्सना केवळ मोटर संरचना ऑप्टिमाइझ करणे आवश्यक नाही तर नियंत्रण प्रणालीच्या बुद्धिमान आणि डिजिटल पैलूंचा सतत शोध घेणे देखील आवश्यक आहे.
पोस्ट वेळ: जानेवारी-३०-२०२३


